[ICT] Sipeed MAIX: RISC-V AI Dev Boards and Peripherals へ Mac から TinyYolo2 を動かしてみた。
購入先:Shigezone〜深圳直送便〜秋葉原ラジオデパート3階
購入価格: 2,800円(税込)
メーカーによる紹介
https://maixpy.sipeed.com/en/
技適は触れないでおこう。
===
◾️Mac bash コンソールで認識したデバイス /dev 配下
cu.Bluetooth-Incoming-Port
cu.usbserial-1440
cu.wchusbserial1440
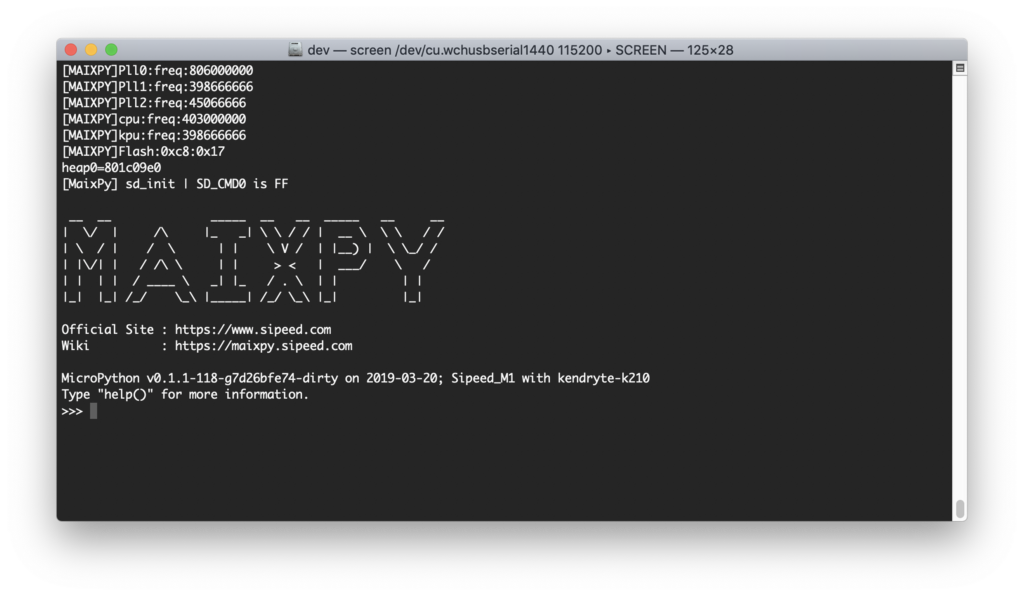
◾️screen コマンドでシリアル接続する
screen /dev/cu.wchusbserial1440 115200
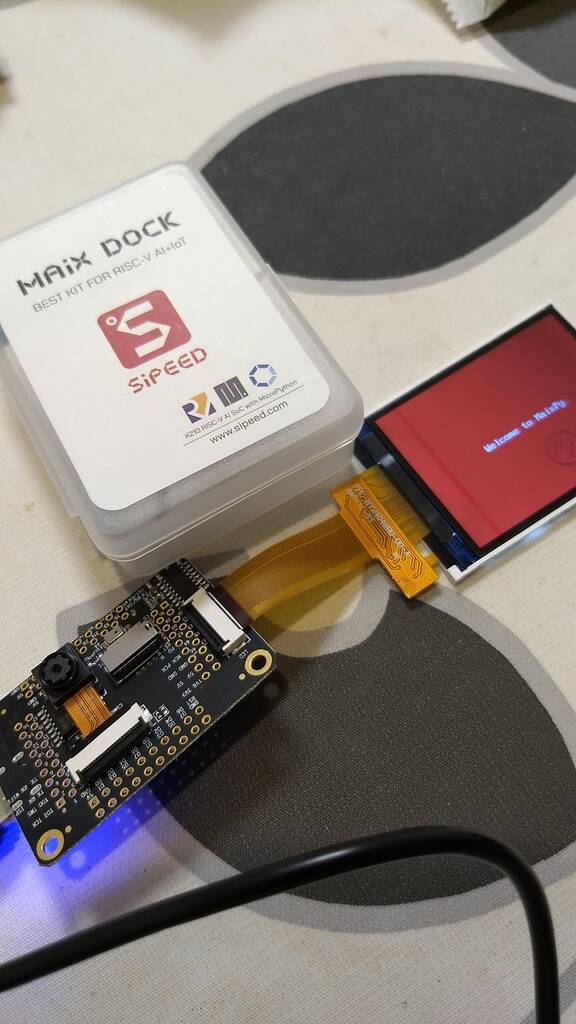
◾️MAIXPY が起動する。
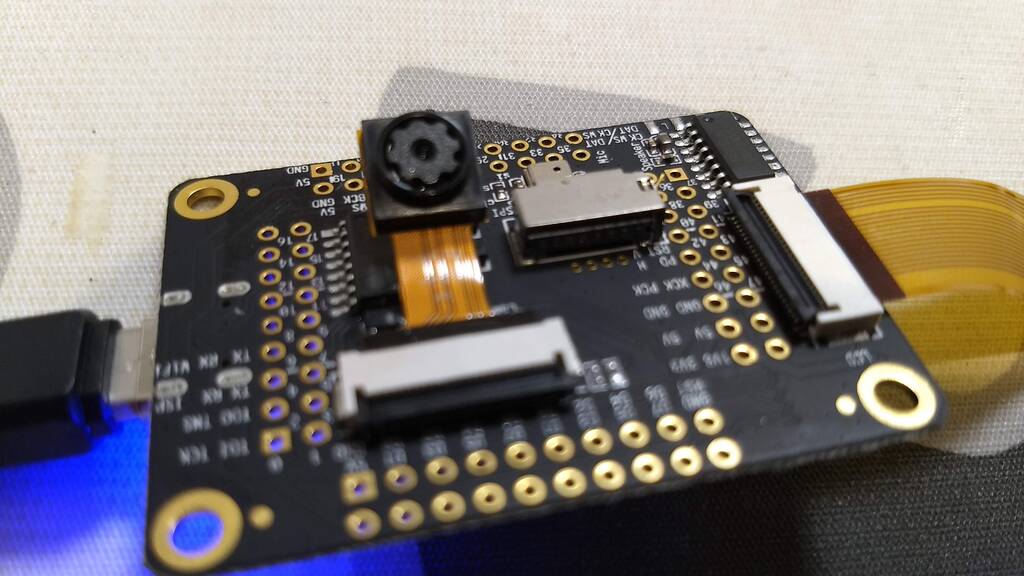
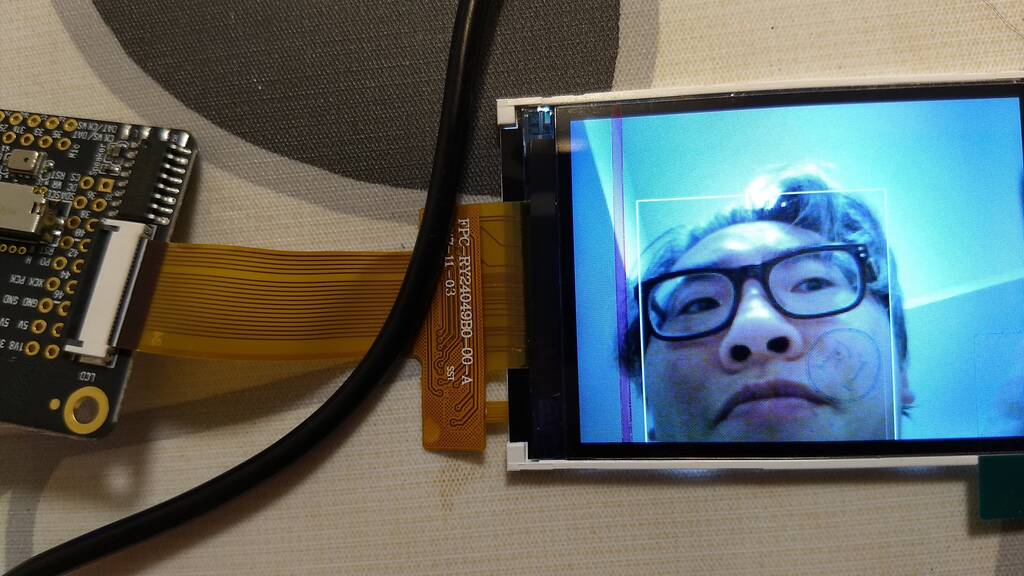
◾️KPU を使った TinyYolo2 で顔認識サンプルを動かしてみる。
サンプルソースはこちら
↓
https://github.com/sipeed/MaixPy_scripts/blob/898a941ffb7a9d90856dcb69d5b4f012babd0951/machine_vision/demo_find_face.py
import sensor
import image
import lcd
import KPU as kpu
lcd.init()
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA)
sensor.run(1)
task = kpu.load(0x300000) # you need put model(face.kfpkg) in flash at address 0x300000
# task = kpu.load("/sd/face.kmodel")
anchor = (1.889, 2.5245, 2.9465, 3.94056, 3.99987, 5.3658, 5.155437, 6.92275, 6.718375, 9.01025)
a = kpu.init_yolo2(task, 0.5, 0.3, 5, anchor)
while(True): img = sensor.snapshot() code = kpu.run_yolo2(task, img) if code: for i in code: print(i) a = img.draw_rectangle(i.rect()) a = lcd.display(img)
a = kpu.deinit(task)◾️画面は顔認識し白枠表示
◾️TinyYolo2 コンソール表示
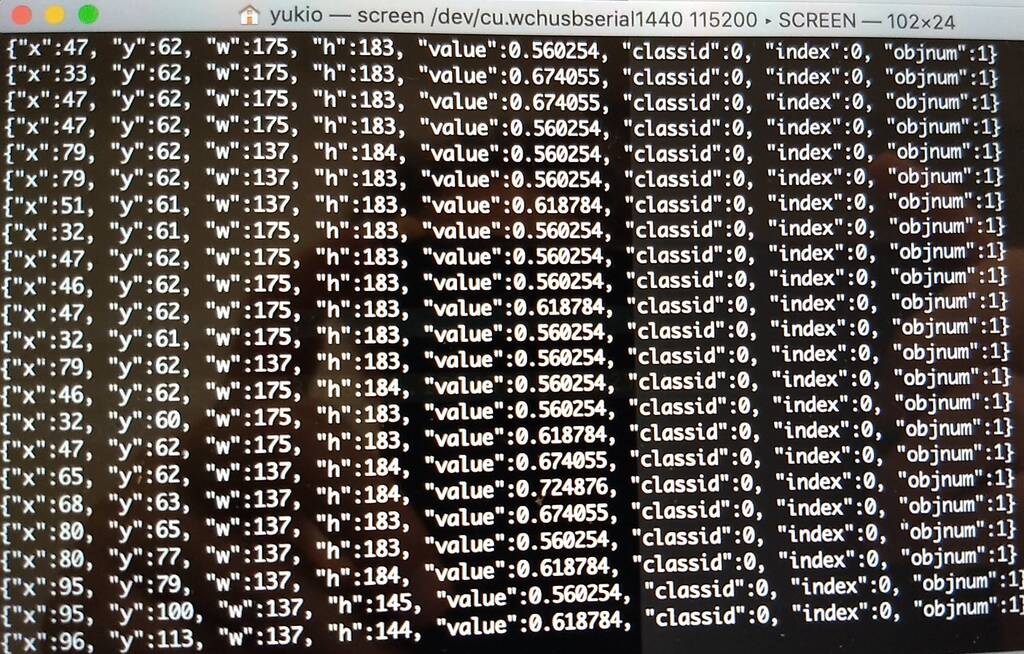
大層なことを何もせずに、サクサクっと簡単に Yolo2 体験ができました。
ご覧いただき有難うございました。
以上
![[資格取得] IBM Cloud for Professional Architect v6 (合格体験談)](https://www.fxfrog.com/wp-content/themes/newscrunch/assets/images/no-preview.jpg)





