[学] Scilabで倒立振子 (Differential Pendulum) 収束シミュレーションを見る
まず、Differential Pendulum ですが、倒立なので Inveretd Pendulum ではないか?と思う方もおられるでしょう。しかし、それでは状態が固定の Inverted であり、倒立振子を実現するのは【差動振子】の結果、倒立するので英語ではDifferential Pendulum となるのです。
と、まぁ本気で数式を考えれば自ずと英語表記も理解できるので、さておき Scilab では制御系設計ツール CACSD サンプルに含まれているので、まずは完成されたサンプルを動作させ、そこから各々が考える倒立振子シミュレーションへ派生できれば良いでしょう。
—
シミュレーション呼び出し手順:
デモ – CACSD – 倒立振子
—
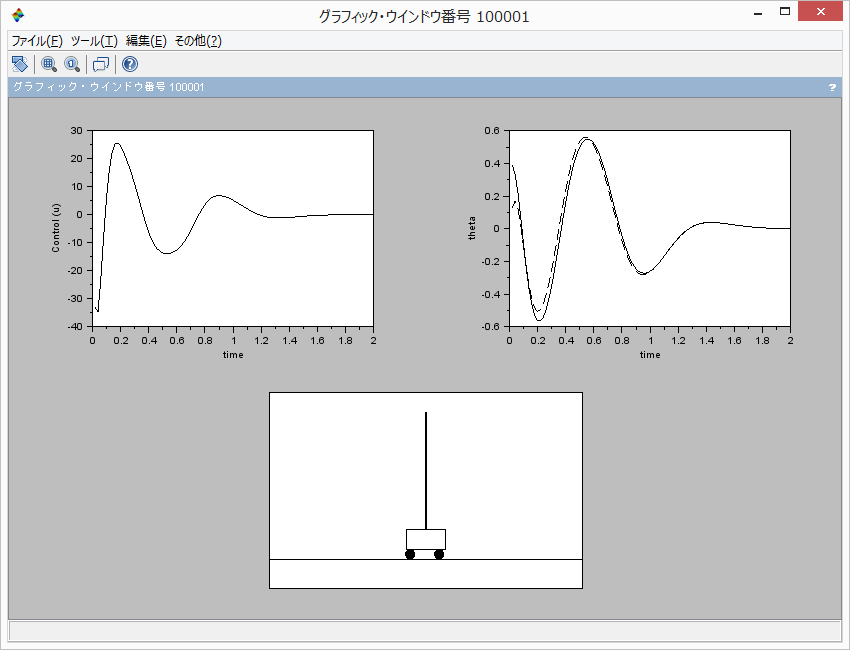
最終的に、このシミュレーション結果が得られるものと頭でイメージできれば、理解は早いでしょう。
{kind=link}
倒立振子の計算式通り、計算をループします。
概ねの予想通り、最初は大きく制御し、次第に小さく制御し、最後は倒立し収束します。
Scilab の良いところは、自動制御を視覚化できるところにあり、「そのシミュレーションはどんな動き」をするのかを頭で考え、それをシミュレーションで理解を深める手助けを行ってくれる。
倒立振子を見ていると、消防出初式の木遣り行進、はしごのりを思わずにはいれませんね。そんな新春の朝。
(正確には木遣り行進、はしごのりをTVで観て、Scilab でそんなデモがあったなと思い出した)
以上